|
||||
|
|
На палубе "Двадцать седьмой"  Ка-25ПЛ на палубе большого противолодочного корабля «Кронштадт» Становилось очевидным, что нужен другой корабельный вертолет, более совершенный, который вошел бы в противолодочный комплекс и являлся бы его высокоманевренным элементом. В этом случае корабли не должны были стремиться к приему контакта от вертолетов - они сами должны продолжать слежение за обнаруженными ПЛ. Это лишь часть требований, которые предъявлялись к вертолету нового поколения Ка-252, проработка которого началась с 1968 г. Вмае 1970 г. после завершения разбора маневров «Океан» Главком ВМФ принял Главного конструктора Н. И. Камова и заместителя командующего авиацией ВМФ генерал-лейтенанта Наумова и заслушал предложения по новому вертолету. Постановление о разработке противолодочного вертолета Ка-252. предназначенного для кораблей проекта 1143 и других, было принято Советом Министров СССР в апреле 1972 г. Заседание Государственной комиссии по вертолету состоялось в июле следующего года. Представленные материалы, обоснованные расчетами, свидетельствовали, что в случае их реализации вертолет будет обладать несравненно более высокими возможностями по сравнению с Ка-25 и не уступать по основным характеристикам зарубежным вертолетам. Предполагалось интегрировать все новое, что к этому времени создано, находится в разработке и близко к завершению. Летно-тактические характеристики вертолета, в частности дальность и продолжительность полета, увеличились на 30-40%, а более мощные и надежные двигатели ТВ 3-117 КМ обеспечивали удельную тяговооружен-ность в 1,7 раза выше по сравнению с Ка-25, что должно было сказаться в первую очередь на безопасности полета. Особое внимание комиссия обратила на новую концепцию построения поисково-прицельной системы. Это было предложение современного уровня развития. Планировалось применение опускаемой гидроакустической станции с высокой степенью автоматизации, Главного конструктора О. М. Алещенко. Отличительные особенности состояли в применении информационно-вычислительной подсистемы на базе бортовой ЦВМ, включении в систему индикатора отображения тактической обстановки, высокой степени автоматизации процесса маневрирования вертолетов группы при поиске ПЛ с применением опускаемых гидроакустических станций и др. В то же время бортовая система «Привод-СВ-борт» совместно с навигационной системой и корабельной аппаратурой должна была обеспечить решение широкого круга задач, связанных с вертолетовождением и маневрированием (режимы работы «Навигация» и «Посадка»). Если по основным характеристикам вертолет Ка-252 должен был превзойти своего предшественника, то темпы его разработки и испытаний не отличались от традиционных. Первый полет вертолета Ка-252 состоялся 8 августа 1973 г., и сразу после этого началось систематическое нарушение установленных сроков, их переносы, корректировки и т. п. В конечном итоге испытания по этапу «А» растянулись почти на 4 года (январь -октябрь 1977 г.) с выполнением 2200 полетов при налете 1400 час. Как видно, количество полетов и налет оказались значительными. После их завершения приняли решение о серийном производстве вертолетов, что совершенно не свидетельствовало о его полной готовности к боевому использованию. С тем, чтобы как-то сократить сроки разработки, одновременно с первым этапом выполнялась программа этапа «Б». По ней также было проведено 464 полета при налете около 500 ч. Испытания шли не совсем гладко и часто прерывались, в том числе и по независящим от разработчиков причинам, например, из-за отказов двигателей. После завершения испытаний 14 апреля 1981 г. вертолет, получивший обозначение Ка-27. был принят на вооружение. Вертолет выполнен по традиционной для фирмы схеме двух трехлопастных несущих винтов противоположного вращения. Лопасти для размещения в ангаре корабля и транспортировки на подъемниках складываются вручную в походное положение вдоль фюзеляжа (на Ка-25 складывание производилось с помощью дистанционного механизма, и подниматься по стремянке на палубе с риском для жизни не было необходимости). Цельнометаллический фюзеляж состоит из передней и хвостовой частей. Передняя часть - кабина экипажа и грузовая кабина. На хвостовой части укреплено хвостовое оперение, состоящее из стабилизатора и двух килей с рулями направления. Взлетно-посадочные устройства вертолета состоят из четырехопорных неубирающихся в полете шасси. Ввиду низкого клиренса вертолета амортизационные стойки шасси сделаны раздвижными, что позволяет при необходимости приподнимать переднюю или заднюю часть вертолета для загрузки бомбового отсека. По бортам вертолета на специальных рамах под створками располагаются надувные баллонеты из водонепроницаемой ткани, используемые в случае аварийной посадки на воду. Наполнение их воздухом производится за счет бортовой п невм ос и с темы, снабженной эжекторами. Баллонеты с рамой весят 242 кг. Силовая установка вертолета обеспечивает привод несущих винтов, генераторов переменного тока, насосов гидравлической системы, компрессора продувочного воздуха и др. агрегатов. В состав ее входят два газотурбинных двигателя конструкции Изотова ТВЗ-117КМ. редуктор РВ-252, турбокомпрессор и системы, обеспечивающие их работу. Мощность двигателя на взлетном режиме составляет 2225 л. с. на номинальном режиме - 1700 л. с. Запас топлива на вертолете составляет 2940 л при централизованной заправке. Часовой его расход на приборной скорости 120 км/ч, по данным испытаний, составляет 470 кг, на ви-сении увеличивается почти на 50% и достигает 690 кг/ч. Экипаж вертолета, учитывая возросшую сложность аппаратуры, пришлось увеличить до трех человек (летчик, штурман, штурман-оператор) и разместить их в двух кабинах. Увеличение количества членов экипажа всегда воспринимается как нежелательное явление и обычно вызывает множество нареканий. Не обошлось без них и на этот раз.  Ка-27  Вертолет Ка-27 обладает неплохими, сравнительно с другими вертолетами подобного класса, характеристиками: крейсерская скорость полета 250 км/ч (на Ка-25 - 180-190 км/ч), дальность до 750 км, тактический радиус порядка 200 км при нахождении на этом удалении около 2 ч. Габаритные размеры вертолета, учитывая ограниченные объемы ангар- ных помещений кораблей, по возможности уменьшены, и со сложенными лопастями винтов он имеет длину 12,2 м, ширину 2.8 м. Диаметр несущих винтов - 15,9 м. На вертолете установлено современное для времени его создания пилотажное, навигационное и противолодочное оборудование. В состав пилотажно-навигационно-го оборудования входят различные измерители и указатели скорости, курса, высоты полета, авиагоризонт АГР-72 (резервный), пилотажный комплекс П KB-252 и навигационный комплекс НКВ-252. С использованием пилотажного комплекса можно производить автоматизированное зависание вертолета по показаниям директорного прибора, автоматическое висение вертолета со стабилизацией высоты по выпущенной длине кабель-троса и углу его наклона. Комплекс включает четырехканальный электрогидравлический автопилот ВУАП-1, гировертикаль, различные датчики (угловой скорости, глубины погружения акустического приемника, указатель параметров висения и др.). Комплекс взаимодействует с доплеровским измерителем путевой скорости и угла сноса, аппаратурой «Привод»), курсовой системой и датчиком воздушной скорости. Основным индикаторным устройством в комплексе является пилотажный командный прибор ПКП-77. Для решения навигационных задач, обеспечивающих выполнение задания от взлета до посадки, автоматического счисления координат местонахождения вертолета на всех этапах полета, привода его на корабль и выдачи навигационной информации потребителям предназначен навигационный комплекс. Противолодочное оборудование вертолета состоит из автономных поисковых средств, работа которых не зависит от других устройств. К ним относятся: приемно-индикаторное устройство А-100 «Пахра» и магнитометр АПМ-73В. На вертолет можно подвесить 36 буев. «Пахра» - это радиоприемное устройство, которое обеспечивает панорамный автоматический обзор буев системы «Баку», световую сигнализацию о работе передатчика буя (18 лампочек), прослушивание его и привод вертолета на работающий буй. Магнитометр АПМ-73В может устанавливаться вместо гидроакустической станции, состоит из стандартного для аппаратуры этого назначения набора блоков и устройств. Существенно увеличена (до 85 м) длина кабель-троса магниточувствительного блока, для намотки которого используется лебедка гидроакустической станции. Основным же и наиболее важным компонентом поискового оборудования вертолета Ка-27, определившим его облик и возможности по решению задач в соответствии с предназначением, является автоматизированная поисково-прицельная система «Осьминог». Она обеспечивает обнаружение ПЛ, находящихся в любом положении, определение их координат и элементов движения, расчет очередных точек зависания при поиске с гидроакустической станцией, отображение навигацион-но-тактической обстановки на индикаторе, выработку данных на применение оружия и др. Ничего подобного ранее на отечественных вертолетах не было. Более того, далеко не все зарубежные вертолеты могут претендовать на подобную степень автоматизации. Система «Осьминог» образована четырьмя подсистемами: гидроакустической, радиолокационной, индикации навигационно-тактической обстановки, информационно-вычислительной -и сопряжена с аппаратурой «Приводов-борт», функциональными системами, бомбардировочным и торпедным вооружением вертолета. 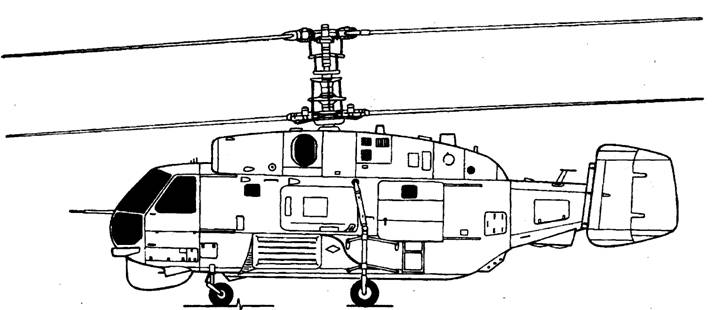 Схема. Гидроакустическая система представлена опускаемой гидроакустической станцией ВГС-3 («Рось-В») с обеспечивающими ее работу устройствами, позволяет обнаруживать ПЛ либо путем посылки зондирующего и приема отраженного от нее импульсов, либо путем прослушивания шумов, создаваемых ПЛ при движении. Станция обеспечивает возможность ненаправленного в горизонтальной плоскости излучения звуковой энергии и направленного кругового (с помощью пяти характеристик направленности) приема сигналов акустической антенной. Кроме блоков и устройств, обычно входящих в состав гидроакустических станций, имеются в станции ВГС-3 совершенно новые: дешифратор, обеспечивающий восстановление сигналов, подвергшихся частотному уплотнению перед передачей от акустического приемника по кабель-тросу на борт вертолета. С тем, чтобы полнее использовать возможности станции ВГС-3, в ее конструкции предусмотрено семь родов работы: шумопеленгования («ШП»), эхопленгования («ЭП»), ручного сопровождения («РС»), шагового поиска («АП»), автоматического сопровождения («АСЦ»), полуавтоматического сопровождения цели («ПАСЦ») и контроля. Для поиска шумящих объектов при круговом обзоре пространства оди- ночной или суммарной характеристикой направленности, вращаемой автоматически, применяется род работы «ШП». Обзор акватории в этом случае составляет порядка 30 с, а поисковая скорость вертолета достигает 70-80 км/ч, что в два раза выше аналогичной характеристики Ка-25. Род работы «ЭПв обеспечивает возможность выполнения поиска путем многократного кругового или секторного обзора акватории при ручном перемещении характеристики направленности, определение пеленга на цель и дальности до нее, а также ручного сопровождения по этим координатам. При круговом обзоре прием эхосигналов осуществляется с помощью веера круговых характеристик направленности, а при секторном -секторных. Для автоматического шагового обзора акватории в активном режиме применяется вид работы «АП», аналогичный применяемому на Ка-25. Однако во время обзора среды значительно меньше. Это объясняется тем, что после излучения импульса акустической энергии прием его производится с помощью секторных характеристик направленности. Через время, равное длительности развертки по дальности (в зависимости от выбранной шкалы дальности), автоматически осуществляется поворот характеристики направленности на 120° («перешагивание»), и весь цикл повторяется (на Ка-25 акустическая антенна поворачивалась на угол 15°). Таким образом, станция ВГС-3 обладает серьезными преимуществами по сравнению с ВГС-2: время обзора акватории в пассивном режиме 30 с, в активном, в зависимости от диапазона дальности 7,5: 15; или 30 с при круговом обзоре и 45 65 и 110 с при использовании секторных антенн. Длительность импульса по желанию экипажа может изменяться (ступенчато) и составляет 14;35;70 и 100 с. Немаловажен и тот фактор, что время выпуска акустической системы существенно сократилось за счет увеличения скорости погружения до 2,6 м/с, а кабель-трос станции удлинен до 150 м Радиогидроакустическая система является основной, но она используется неавтономно, а совместно с другими подсистемами и прежде всего радиолокационной - несколько доработанная РАС «Инициатива-2КМ». С тем, чтобы дать экипажу представление об обстановке в районе, в состав ППС включили подсистему индикации (ИНТО). Она обеспечивает отражение как первичной, так и вторичной информации о целях, взаимодействующих силах и других данных, необходимых для принятия тактических решений. При этом к первичной информации относится радиолокационное изображение надводной (наземной) обстановки, которая воспроизводится на экране в виде яркостных отметок, и вторичной - данных от ВГС-3, канала привязки информационно-вычислительной подсистемы (ИВП) и имеет вид символов, буквенно-цифровых формуляров и графиков (траекторий движения, линий пеленгов, векторов скорости). Экран индикатора довольно большой, диаметр его составляет 300 мм. Масштабы изображения на нем переменные.  Ка-27 Индийских ВВС Информационно-вычислительная подсистема предназначена для расчета по данным гидроакустической станции, радиолокационной подсистемы и сопряженного с ППС оборудования параметров, необходимых для решения тактических задач, а также синхронизации и управления работой подсистем и ППС в целом. ИВП состоит из прибора ввода-вывода и специализированного вычислительного прибора (СЦВП). Решение поставленных задач осуществляется с максимальным использованием программных методов. Вычисления производятся в двоичной системе координат и представлением чисел в дополнительном модифицированном коде с фиксированной запятой. Быстродействие С ЦВМ - 150000 коротких (типа «сложение») операций в секунду. Поисково-прицельная система «Осьминог» имеет несколько различных режимов, облегчающих решение противолодочных задач: «Навигация», «Поиск», «Слежение», «Атака», и вспомогательный режим - «Контроль». «Навигация» применяется при радиолокационном осмотре поверхности, наблюдении за взаимодействующими вертолетами. «Поиски используется при поиске ПЛ во всех положениях, расчетах очередной точки зависания и выработки сигналов для вывода в нее вертолетов (по пеленгу и дальности, установленным на неоперативном пульте управления). «Слежение» имеет несколько программ. При решении этой задачи одиночным вертолетом программой предусматриваются периодические перелеты в очередные точки установления контакта (в зависании с использованием гидроакустической станции) в соответствии с перемещением наблюдаемой на экране отметки ПЛ. После двух последовательных замеров координат с помощью ВГС-3, работающей в активном режиме, рассчитывается ее место и параметры движения, а также определяется следующая точка зависания. Штурман вертолета при необходимости может высветить на экране тактический формуляр, содержащий следующую информацию: дальность, пеленг, курс и скорость ПЛ. Вывод вертолета в точку зависания осуществляется автоматизированно с помощью ИВП и системы «Привод-СВ-борт». «Атака» применяется в случае использования средств поражения и может производиться как одиночным вертолетом, так и парой. В первом случае за точку сброса оружия принимается последнее место обнаружения ПЛ. И соответственно этому рассчитывается траектория выхода в нее, а сигналы управления выдаются на директорный прибор. По мере подлета вертолета к точке сброса оружия в ППС вырабатываются сигналы на его применение (открытие бомболюков, подача электропитания на торпеду и ее сброс). При атаке парой один из вертолетов продолжает слежение за ПЛ, а второй использует средства поражения. Не позднее чем за 16 с до сброса он должен получить уточненную дальность до ПЛ. Таким образом, основное отличие инструментального обеспечения вертолета Ка-27 по сравнению с вертолетами Ка-25ПЛ, Ми-14ПЛ состоит в наличии ЦВМ, И НТО и более совершенной гидроакустической станции, Все это позволило автоматизировать вывод вертолета по заданной траектории в точку зависания, производить вторичную обработку информации от гидроакустической станции, автоматизировать обмен информацией в группе, а самое, пожалуй, главное - иметь наглядное представление о воздушной, надводной и подводной обстановке. Конечно, корабельные вертолеты без особых затруднений могли применяться и в качестве базовых, но считалось, что для этого более подходит вертолет специальной постройки, поэтому еще до того, как было принято решение о разработке Ка-252, уже велись работы по созданию подобного. В начале разработки он именовался как В-14, затем получил обозначение МИ-14ПЛ. |
|
||