|
||||
|
|
Самолеты ДРЛО  TBM-3W ВМС США в феврале 1944 г. инициировали работы в рамках проекта "Кадиллак", направленного на создание авиационной системы раннего обнаружения. За разработку ключевого элемента комплекса - РЛС - отвечали ученые Радиационной лаборатории Массачусетского Технологического института. Весной 1944 г. РЛС AN/ APS-20 была готова к установке на самолет и проведению испытаний. В качестве носителя выбрали палубный торпедоносец ТВМ-3 "Эвенджер (по мнению американцев, именно он и стал первым в мире самолетом ДРЛО). К августу торпедоносец на авиабазе ВМС США Джексновилл прошел модернизацию, связанную с размещением на его борту РЛС: все вооружение было демонтировано, а под средней частью фюзеляжа установлен обтекатель с антенной РЛС. Для сохранения путевой устойчивости, аналогичной "стандартному" ТВМ-3, на стабилизаторах пришлось установить дополнительные вертикальные поверхности - хвостовое оперение стало трехкилевым. Впервые американский "летающий радар" поднялся в воздух в августе 1944 г.; не дожидаясь даже начала испытаний, командование ВМС еще в июне выдало заказ на 40 самолетов ДРЛО TBM-3W с началом поставок в марте 1945 г. Экипаж TBM-3W состоя из двух человек - летчика и оператора РЛС, станция позволяла обнаруживать воздушные цели, летящие над водной поверхностью, на удалении до 160 км от самолета. Как и планировалось, ВМС получили от промышленности 40 самолетов TBM-3W, переоборудованных из обычных торпедоносцев, но в войне они участия принять так и не успели. За ними последовали машины модификации TBM-3W2 с доработанной РЛС, позволяющей обнаруживать на поверхности моря шнорхели подводных лодок. Количество "Эвенджеров" в варианте ДРЛО, состоявших на вооружении ВМС США, достигло своего апогея в 1953 г. - 156 самолетов, но уже через три года - в 1956 г. - последний TBM-3W списали из частей первой линии в резерв. США поставляли TBM-3W своим союзникам: восемь самолетов канадским ВМС в сентябре 1952 г., 24 - ВМС Нидерландов в сентябре 1953 г. и десять машин - морским силам самообороны Японии. Четыре машины в 1948 г. проходили испытания в составе 745-й эскадрильи ВМС Великобритании. 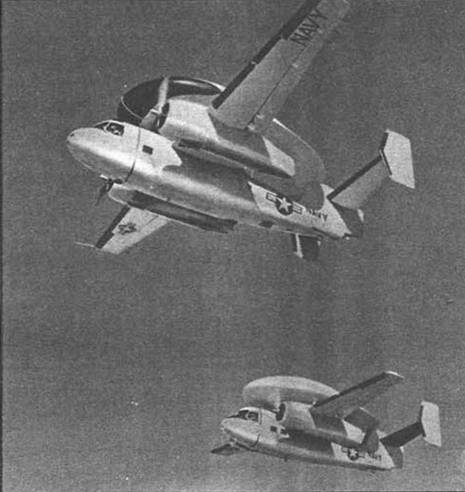 WF-2 «Трэйсер» "Эвенджер" оказался далеко не идеальной платформой для установки РЛС, к примеру, недостаточный внутренний объем фюзеляжа позволял разместить лишь одного оператора РЛС, причем в очень стесненных условиях. В последующие за окончанием войны годы, американцы экспериментировали не столько с РЛС, сколько с носителем. В ноябре 1948 г. совершил первый полет торпедоносец Грумман AF-2 "Гардиэн", переоборудованный в "летающий радар", всего построили 153 самолета AF-2W, оснащенных РЛС AN/APS-20. Эти же радары в 50-е годы устанавливались на палубные штурмовики AD1; построен 31 самолет в варианте AD-3W, 168 в варианте AD-4W и 218 AD-5W; 50 самолетов AD-4W американцы передали ВМС Великобритании, где они получили наименование "Скай- рейдер" AEW Мк. 1. Англичане получили первые машины в 1952 г. С вооружения последние варианты AD- 5W в США сняли в 1967 г. (к тому времени самолеты получили обозначение ЕА-1), в Великобритании - в начале 60-х годов. За характерный "живот" обтекателя антенны РЛС самолеты получили прозвище "гуппи" - в честь "брюхастой" аквариумной рыбки. Самолеты ДРЛО на базе "Эвенджера", "Гардиэна", "Скайредера" и "Ганнета" практически не отличались друг от друга по составу бортового электронного оборудования - различия были "чисто самолетными", разве что на AD-5W количество операторов РЛС увеличили с двух до трех. Строго говоря, эти машины еще не были самолетами дальнего радиолокационного наблюдения в сегодняшнем понимании. РЛС AN/APS-20 имела весьма скромные характеристик при работе по воздушным целям, основной задачей самолетов являлся не контроль воздушного пространства, а наблюдение за поверхностью моря - поиск выдвижных устройств подводных лодок. Более того, самолеты предназначались в первую очередь именно для поиска субмарин. "Гардиэны" состояли на вооружении противолодочных эскадрилий флота США и отрабатывали тактику "хантер-киллер" (охотник - убийца). В роли "хантера" выступал самолет, оборудованный РЛС, но лишенный возможности нести вооружение, "киллер", наоборот, мощного радиолокатора не имел, зато нес глубинные бомбы или торпеды. Более серьезными возможностями обладала новая РЛС AN/APS-82, разработанная фирмой Хазелтайн. Станцию установили на модернизированный палубный двухмоторный противолодочный самолет Грумман S-2 "Трэккер". Первый вариант, WF-1, оказался неудачным - разработчики не сумели довести до ума РЛС. Второй вариант стали делать на основе планера транспортного самолета TF-1 "Трейдер", который, в свою очередь, также ведет родословную от "Треккера". Самолет ДРЛО получил наименование WF-2 "Трэйсер" (встречаются также обозначения TF-1В и Е-1 В); от аббревиатуры WF пошло прозвище самолета - "Willy Food". Антенну РЛС разместили в большом неподвижном обтекателе, установленном на стойках над фюзеляжем. Монтаж огромного обтекателя антенны РЛС потребовал внесения существенных изменений в исходную конструкцию: хвостовое оперения стало двухкилевым, носовую часть фюзеляжа в целях сохранения балансировки удлинили на 18 дюймов, плоскости крыла стали складываться не вверх, как на транспортном самолете, а укладываться вдоль фюзеляжа. Изменение конструкции механизма складывания крыла привело к тому, что при сложенных плоскостях центр тяжести самолета сильно смещался назад и самолет садился на хвост. Пришлось вводить дополнительную, четвертую опору шасси, которая использовалась для перемещения самолета со сложенными плоскостями. По сравнению с РЛС AN/APS-20, новая станция имела лучшие характеристики по определению высоты полета воздушных целей за счет введения режима стабилизации антенны; селекцию целей на фоне водной поверхности удалось повысить путем перехода на работу в более коротком диапазоне волн (РЛС AN/APS-20 работала в диапазоне излучения с длиной волны 300-100 см, AN/APS-82 - 100-30 см). Экипаж самолета - два летчика и два оператора бортового оборудования, один пилот может выполнять функции тактического координатора. В 1958 г. были построены первые три машины, полностью оснащенные бортовым оборудованием; ВМС США в 1958-1961 г.г. получили 88 самолетов "Трэйсер" (поставки завершены 12 сентября), последний из которых был снят с вооружения резервной эскадрильи VAW-78 19 ноября 1977 г. Испытания самолеты проходили в июле 1959 г. на авианосце "Беннингтон". Первые же "Трейсеры" поступили на вооружение эскадрилий VAW-12 (Атлантический флот) и VAW-11 (Тихоокеанский флот) в 1960 г. 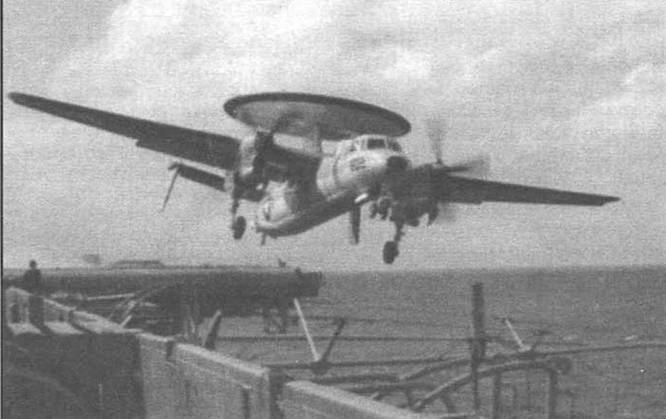 Е-2С «Хокай» РЛС AN/APS-82 по-прежнему не удовлетворяла военных, и еще до начала серийного производства самолетов ДРЛО "Трэйсер" ВМС в феврале 1956 г. выдали запрос предложений на разработку перспективного палубного самолета ДРЛО. Конкурс вновь выиграла фирма Грумман; предложенный ею вариант представлял собой с аэродинамической точки зрения дальнейшее развитие "Трэйсера", только антенна РЛС размещалась не в неподвижном обтекателе оживальной формы, а в круглом, вращающемся, диаметром 7,3 м. Самолет получил новую РЛС AN/APS-96, вместо поршневых двигателей Райт R-1820-82 мощностью по 1525 л.с. поставили турбовинтовые моторы Аллисон Т56- А8 мощностью по 4050 л.с. Принципиальным отличием самолета, получившего в ВМС обозначение W2F-1 "Хокай" (изменено в 1962 г. на Е-2А), от предшественников стала интеграция бортового оборудования в единый комплекс, включающий РЛС, бортовую ЭВМ AN/ASA-27, систему обмена информацией AN/ASQ-52 и инерциальную навигационную систему AN/ASN-36. Бортовой комплекс позволял экипажу самолета не только обнаруживать воздушные цели и определять их местоположение, но и передавать информацию о воздушной обстановке на корабельный КП в автоматическом режиме. Первый полет полностью оснащенный БРЭО "Хокай" совершил в апреле 1961 г. (аэродинамический прототип поднялся в воздух 21 октября 1960 г.), а поставки ВМС США начались только в начале 1964 г., когда 19 января в торжественной обстановке на авиабазе ВМС США Сан-Диего эскадрилья VAW-11 получила первый W2F-1; последний самолет W2F-1/E-2A передан ВМС в феврале 1967 г. Первый успешный перехват в автоматическом режиме экипаж "Хокая" совершил в феврале 1963 г., экипаж управлял действиями пары палубных перехватчиков F-4B "Фантом". Эскадрилья VAW-11 достигла состояния боевой готовности в первой половине 1965 г., тогда она базировалась на авианосце "Китти Хаук".  Е-2В «Хокай» из эскадрильи VAW-88 Развитие самолетов семейства Е- 2 велось в направлении совершенствования бортового оборудования. В 1965-67 г.г. на двух самолетах проводились испытания и отработка экспериментальной РЛС AN/APS-111, послужившей основой для создания серийных станций AN/APS-120/125. В 1969 г. (первый полет состоялся 20 февраля) начались летные испытания модификации Е-2В, доработки БРЭО была направлены на повышение надежности и ремонтопригодности бортовых систем, в состав бортового комплекса ввели новую цифровую ЭВМ Литтон L-304. В 1970-1971 г.г. в вариант Е-2В был переоборудован 51 самолет Е-2А (всего построено 59 Е-2А, два переоборудованы в учебно-тренировочные ТЕ-2А, два - использовались в программе разработки и летных испытаний Е-2С). В апреле 1968 г. Пентагон санкционировал разработку глубокой модификации "Хокая" - самолета Е-2С. Новый авиационный комплекс должен был быть способен обнаруживать воздушные цели на фоне любой подстилающей поверхности, а не только водного пространства. Вариант Е-2С по составу бортового оборудования, концепции боевого применения стал действительно новым самолетом. Кроме РЛС AN/APS-120, способной обнаруживать маловысотные воздушные цели на фоне земной поверхности (в том числе на фоне гор), сменившей РЛС AN/APS-96, на Е-2С поменяли инерциальную навигационную систему и установили пассивную систему обнаружения источников электромагнитного излучения AN/ALR-59 (систему радиотехнической разведки). Антенна системы AN/ALR-59 смонтирована в увеличенном по сравнению с предыдущими модификациями носовом обтекателе. Пассивная система позволяет засекать источники излучения, определять их местоположение и идентифицировать по спектру сигнала на расстоянии примерно вдвое большем, чем дальность обнаружения воздушных целей РЛС AN/APS-120. Важным нововведением, направленным на улучшение летных характеристик, стала замена двигателей Аллисон Т56-А-8 мощностью по 4050 л.с. на ТВД Т56-А-422 мощностью по 4500 л.с. Более мощные моторы резко повысили безопасность полета в случае отказа одного из двигателей, особенно в жарком и влажном климате тропиков. Двигатели оборудовались новыми воздушными винтами фирмы со стеклопластиковыми лопастями с полукруглыми законцовками Хамильтон Стандарт (на Е-2А/В стояли винты Аэропродакс металлическими лопастями и с прямоугольными законцовками). Новые винты несколько уменьшили уровень шума и вибраций в кабине самолета. Аэродинамический прототип Е- 2С, совершил первый полет 18 января 1971 г., через два месяца, 16 марта, в воздух поднялся второй прототип, оснащенный полным комплектом бортового оборудования. Первые Е-2С поступили на вооружение эскадрильи VAW-123, дислоцировавшейся на береговой авиабазе ВМС в Норфолке, а первым авианосцем, получившим Е-2С стала "Саратога" (в сентябре 1974 г.). 27 сентября 1974 г. "Сара", в состав палубного авиакрыла которой входило четыре Е-2С, отправилась в Средиземное море на несение боевой службы. "Круиз" продолжался шесть месяцев, в ходе него палубные самолеты поднимались в воздух 288 раз и только в восьми случаях их не контролировал экипаж одного из четырех Е-2С. "Саратогу" сменил "Джон Ф. Кеннеди", на борту которого находилась вторая флотская эскадрилья, получившая на вооружение "Чарли" (так на флоте прозвали Е-2С) - VAW-125. Самолеты Е-2С постепенно заменяли в эскадрильях флота предыдущие модели Е-2В, последний из которых сняли с вооружения в 1988 г. В процессе производства бортовое оборудование самолета постоянно совершенствовалось, порой весьма серьезно, но на обозначении машины доработки не отражались. С декабря 1976 г. (начиная с 35-го серийного Е-2С) стали устанавливать РЛС AN/APS-125, позволявшую с высоты 9000 м обнаруживать до 800 воздушных целей на удалении до 480 км и наводить истребители на 40 целей одновременно; аналоговую бортовую ЭВМ заменили цифровой. В 1977-84 г.г. на всех ранее построенных Е-2С " 120-е" РЛС заменили на" 125-е". Станции AN/APS-120/125, точнее их антенны, имели существенный недостаток - большой уровень боковых лепестков диаграммы направленности. Применение на новой РЛС AN/APS-138 комбинированной антенны, состоящей из десяти антенн типа "волновой канал" (в комплексе вся антенна РЛС представляет собой некое приближение к наиболее перспективному типу передающих устройств - фазированным антенным решеткам, ФАР), позволило снизить уровень боковых лепестков, и, как следствие, улучшить характеристики станции по селекции целей. Серийное производство "138-х" РЛС началось в 1983 г., в том же году ими стали оснащать как вновь строящиеся, так и состоящие на вооружении "Хокай". Самолеты выпуска 1987-1989 г.г. получили еще более совершенную РЛС AN/APS-139, имеющую режим обнаружения и сопровождения малоскоростных воздушных и надводных целей. Помехозащищенность станции улучшена за счет введения автоматического переключения на один из десяти фиксированных частотных радиоканалов в случае применения противником активных электромагнитных помех. Наиболее совершенной на сегодняшний день из РЛС, устанавливаемых на "Хокаях", является РЛС AN/APS-145, которая применяется на Е-2С, начиная с самолета с заводским номером 161784. Усовершенствования РЛС направлены на увеличение дальности работы и дальнейшее повышение помехозащищенности. Уменьшение скорости вращения на один оборот в минуту (5 об/мин. вместо 6 об/мин. у РЛС более ранних моделей, в режиме точной пеленгации скорость вращения антенны РЛС - 3 об/мин.) наряду с уменьшением частоты повторения импульсов в передающем сигнале позволило увеличить дальность обнаружения воздушных целей класса "бомбардировщик" на 40% - до 680 км. Усовершенствованные ЭВМ и программное обеспечение позволяют обнаруживать до 2000 воздушных целей. Параллельно с совершенствованием РЛС велась работа по улучшению всего бортового комплекса. В конце 70-х годов Е-2С стали оснащаться более совершенными пассивными системами обнаружения AN/ALR-73; аппаратурой, обеспечивающей передачу данных о воздушной обстановке по "закрытым" каналам связи. Самолеты, получившие "138-ю" РЛС, систему AN/ALR-73, цифровую бортовую ЭВМ и "закрытую" радиосвязную аппаратуру получили в ВМС обозначение Е-2С "Гроуп 0"; они поставлялись в 1980-1988 г.г. "Хокай" "Гроуп I" ВМС стали получать с августа 1989 г., эти машины отличались наличием "139-й" РЛС и более мощных турбовинтовых двигателей Т56-А-427 (установка более мощных и экономичных ТВД чуть ли не единственное усовершенствование в конструкции "Хокая", непосредственно не связанное с БРЭО, в то же время лишние лошадиные силы "зарезервировали" возможность дальнейшего роста взлетной массы, связанной с установкой нового БРЭО ). В июне 1992 г. на авиабазе Мирамар достигла состояния первоначальной боевой готовности первая эскадрилья Е-2С "Гроуп II", оснащенная РЛС AN/APS-145, приемниками спутниковой навигационной системы, новыми ЭВМ, устройствами отображения тактической информации и радиосвязным оборудованием. Существующими планами развития авиации ВМС США предполагается модернизация всех поставленных самолетов "Гроуп I" в "Гроуп II" и снятие с вооружения самолетов "Гроуп 0" к 2004 г.; к 2010 г. все самолеты Е-2С будут переоборудованы путем установки новой БЦВМ, усовершенствованных рабочих консолей операторов БРЭО и систем спутниковой связи в вариант "Хокай 2000". Первый полет демонстрационного самолета "Хокай 2000" состоялся в начале 1998 г. В начале 90-х годов ВМС США рассматривали возможность создания палубного самолета ДРЛО, предназначенного для замены "Хокая". В рамках этой программы фирма Лок- хид совместно с фирмой LTV разработала проект самолета ДРЛО на базе палубной противолодочной машины S-3 "Викинг". На S-3AEW предполагалось установить перспективную РЛС с фазированной антенной решеткой и круговым сканированием, расположенную в неподвижном надфюзеляжном обтекателе треугольной формы. Проект не был реализован в металле, поскольку ВМС решило закупить дополнительное количество "Хокаев" и продолжить работы, направленные на повышение боевой эффективности этих самолетов. |
|
||