|
||||
|
|
Техника маневрирования Смена полосы движения. Часто при движении автомобиля могут возникать ситуации, при которых необходимо перемещение автомобиля в пределах ширины одной полосы движения или всей проезжей части дороги. Перестроиться – значит расположиться по-иному. Правила дорожного движения под перестроением подразумевают изменение транспортными средствами мест в рядах, т. е. переход из одного ряда в соседний или следующий за ним. Меры безопасности при этом едины независимо от причин перестроения и числа рядов, охватываемых маневром. Правила дорожного движения обязывают подать предупредительный сигнал при выезде из занимаемого ряда, пропустить транспортные средства, движущиеся в прямом направлении, а при одновременном взаимном перестроении в соседних рядах уступить дорогу находящемуся справа. Время, требующееся для смены полосы в интервале скоростей 30–120 км/ч, составляет по экспериментальным данным 4,0–5,7 с. Такое небольшое изменение времени маневра объясняется нелинейной зависимостью длины маневра от скорости движения. Оптимальной длиной маневра смены полосы движения по удобству и уверенности управления следует считать 50...60 м. Казалось бы, при большей протяженности маневра его выполнение облегчается. Но на самом деле это не так. Маневр смены полосы теряет чистоту и получается размазанным. Происходит несколько лишних виляний автомобиля, прежде чем он попадает на нужную полосу. Условия смены полосы движения на скорости свыше 80 км/ч при заданной длине маневра менее 50 м следует рассматривать как стесненные. Протяженность смены полос зависит и от скорости движения. Если вы меняете полосу на скорости 100 км/ч, оптимальная протяженность будет около 100 м. Перестроение в рядах может оказаться обязательным при подъезде к тротуару (съезде на обочину) для остановки, при повороте и развороте на перекрестках и перегонах дорог. В последнем случае оно должно быть закончено за 15 м до перекрестка или до места поворота (разворота) на перегоне. Тому, кто не успел это сделать, приходится отказаться от намеченного маневра. Некоторые могут сказать: «Я могу и на скорости 100 км/ч сменить полосу на расстоянии 40 м». Что же, можно. Но как себя будут чувствовать пассажиры? Скорее всего очень плохо! Установлено, что при значении коэффициента поперечной перегрузки ?=0,03 водитель и пассажиры не ощущают силовых воздействий, с помощью которых можно определить перемещение автомобиля в горизонтальной плоскости. Критерием оценки движения при этом служит орган зрения, который, очевидно, имеет нижний порог ощущения несколько ниже порога ощущения силовых воздействий. Значение коэффициента поперечной перегрузки растет с увеличением скорости движения, видимо, из-за порога чувствительности. Значение коэффициента поперечной перегрузки в начале маневра при уходе со старой полосы несколько больше, чем при завершении маневра. Это объясняется стремлением водителя закончить первую фазу смены полосы движения на более коротком расстоянии для того, чтобы оставить возможность более плавного входа на прямолинейный участок при завершении маневра. Опытные водители в свободных условиях делают смену полосы обычно «равновеликой». У пассажиров при этом обычно не возникает неприятных ощущений от маневра. Но водитель должен знать, что наилучшая траектория смены полосы – это очень плавная кривая (почти прямая), которая состоит из нескольких закруглений довольно большого радиуса (более 400 м). Траектория пути перестроения Правилами дорожного движения не регламентируется. При интенсивном и уплотненном движении, когда заняты все ряды, водители перестраиваются постепенно, переходя из ряда в ряд под острым углом. Если проезжая часть свободна, а транспортные средства находятся далеко и, следовательно, не возникает помех движению (как этого требуют Правила дорожного движения), можно за один прием перейти от одного крайнего ряда в другой, двигаясь почти поперек улицы. Рекомендовать водителю специальные ограничения, каким-то образом определять протяженность зоны перестроения не имеет смысла – на улицах и дорогах выполняется немало маневров, осуществляемых по траектории, почти перпендикулярной оси дороги: въезд во двор на левой стороне, выезд со двора с поворотом налево, разворот из правого ряда. Бегущий интервал. Опытные водители всегда используют возможность войти в поток автомобилей с параллельного курса, так как при этом появляется возможность встроиться в такой интервал, в который без переходно-скоростной полосы встроиться нельзя, не рискуя вызвать столкновение автомобилей. Кроме того, при отсутствии полосы разгона водитель вынужден ожидать интервала в 3–4 раза большего. А такие интервалы в плотном потоке встречаются не часто. Итак, опытные водители, встраиваясь в минимально безопасный интервал между движущимися автомобилями, меняют полосы движения постепенно, по частям, не врезаясь нахально между автомобилями основного потока и как бы не раздвигая их при совместном маневрировании. Такое постепенное маневрирование вполне безопасно, так как и интервал, и маневрирующий автомобиль перемещаются совместно. Наиболее удобно выполнять подобный маневр при наличии специальной разгонной полосы, на которой автомобиль разгоняется до скорости на основной дороге. Если есть разгонная полоса и ваш автомобиль набрал на ней скорость, равную скорости потока, то при плотном потоке принимаемый интервал может быть равен длине вашего автомобиля плюс безопасный интервал 5–10 с. Подобный маневр легко осуществить на петлях съезда. Если видимость на дороге хорошая, то, заранее выбрав интервал в подходящем потоке, можно разгоняться еще на петле съезда. В этом случае встраивание заканчивается на более коротком участке пути. Вилек рулем на льду. Все было хорошо... Автомобиль уверенно двигался по дороге. Хотя покрытие было несколько скользким. Водитель чувствовал себя спокойно и без напряжения управлял автомобилем. Впереди, метров за 50, на обочине дороги остановился другой автомобиль. Когда до него оставалось уже метров 5–7, внезапно открылась его левая дверь. Нужно было делать маневр. В обычных условиях это не представляло бы опасности, так как скорость была невелика. Водитель стандартным методом круто повернул рулевое колесо с тем, чтобы потом, более плавно на своей полосе без выезда на встречную закончить маневр. Но автомобиль не пошел влево, а продолжал двигаться прямо. Удар. И оторванная дверь «распласталась» на дороге. Водителя стоящего автомобиля спасло только то, что он вышел не сразу, а на секунду задержался в кабине. Этот инцидент произошел потому, что водитель объезжавшего автомобиля не настроился на «ледяное управление», а может быть, и не знал этого метода. Как же он должен был поступать в данном случае? Нужно было очень плавно, все время чувствуя контакт шин с дорогой, выполнять маневр объезда. Может быть, он при этом и задел бы злополучную дверь, а может быть, и нет. Но то, что при резком маневре рулевым колесом автомобиль пойдет юзом и станет неуправляемым – это уж точно. Чтобы выяснить поведение автомобиля и границы его управляемости на льду, был проведен эксперимент. В результате было установлено, что на горизонтальной площадке, покрытой льдом, при интенсивности приложения нагрузки к рулевому колесу, аналогичной летней (когда коэффициент сцепления равен 0,5–0,6), передние колеса теряют «силовое замыкание» в зоне контакта шины с дорогой, и автомобиль, потерявший управление, часто сползает на обочину из-за наличия поперечного уклона дороги. При очень плавном приложении нагрузки к рулевому колесу автомобиль следует по траектории без бокового увода шин или при очень маленьком его значении. При резком же повороте, прежде чем шины успевали деформироваться в поперечном направлении, начиналось интенсивное проскальзывание, а затем скольжение в зоне контакта шины с дорогой, что и приводило к неуправляемости автомобиля. Хотя скорость движения автомобиля при резком приложении усилия к управляемым колесам несколько снижается (приблизительно на 3–11 % при скорости 60 км/ч), это практически не играет большой роли. Несмотря на малые изменения скорости, водители и пассажиры при этом испытывают, кроме угловых перемещений и боковых нагрузок, еще и дополнительные кратковременные линейные перегрузки (1–3 м/с?). Это иногда может вызывать неуверенность у некоторых водителей при управлении автомобилем. Какой вилек для автомобиля безопасен? 1. Водители знают, что на ровной горизонтальной площадке автомобиль ведет себя одинаково как при вильке вправо, так и влево, поскольку автомобиль создается всегда симметричным, рассчитанным для движения по горизонтальной плоскости, а не для езды по реальной дороге с поперечным уклоном. Да и создать автомобиль, учитывающий поперечный уклон, сложно, так как последний различен на разных участках. Интересно отметить, что продольная ось автомобиля после затухания колебаний не направлена по линии, установленной до вилька, а имеет некоторое отклонение. Этот факт можно, видимо, объяснить внутренними потерями при деформациях шины, резиновых втулок, дорожного покрытия, а также проскальзыванием шин в зоне их контакта с дорогой. Наибольшую роль в данном процессе, видимо, играет проскальзывание шин в зоне их контакта. Поэтому после окончания колебаний продольной оси требуется вмешательство водителя для сохранения начального направления движения. Центробежная сила, действующая на автомобиль и человека, пропорциональна их массе. Но необходимо учитывать, что центробежная сила меняется вместе с направлением действия. Это значительно усугубляет воздействие ее на организм человека. Действие перегрузки, например, можно представить наглядно следующим образом: в течение примерно 1 с центробежная сила, изменяя свое направление, меняет свое значение от – 45 кгс (влево) до +15 кгс (вправо). Значит, на человеческий организм в течение 1 с действует сила в 60 кгс (45+15), а это равносильно удару указанного значения. Поэтому водитель, попадающий в обстановку колебательного процесса автомобиля в поперечной плоскости, начинает управлять менее уверенно. А если колебания не затухают, а продолжаются (даже без увеличения размаха), водитель быстро утомляется. Аналогичная картина происходит при движении по неровной дороге, так как крен вокруг вертикальной оси обязательно вызовет и горизонтальные колебания автомобиля. 2. При вильке вправо автомобиля, движущегося по прямолинейной дороге с поперечным уклоном дорожного покрытия (2 %), симметричность картины колебаний несколько нарушается. Большая амплитуда отклонений направлена в сторону кромки проезжей части, что при ограниченной ширине дорожного полотна может привести к сходу автомобиля с дороги. Необходимо вмешательство водителя, чтобы удержать автомобиль на предназначенной ему полосе движения. 3. При первоначальном вильке автомобиля к оси дороги (влево) характер колебания остается прежним, но со значительно меньшими амплитудами. Видимо, начальная стадия колебаний требует большего количества энергии, чем в предыдущих двух случаях. В данном же случае водитель чувствует себя более уверенно (при отсутствии встречного транспортного потока), так как первоначальный импульс колебаний уводит автомобиль к оси дороги. 4. Некоторые любят ездить по оси двухполосной дороги с двускатным профилем. Несмотря на то что при этом своей левой половиной автомобиль движется по встречной полосе, они считают, что такое движение наиболее устойчиво. Характер изменения отклонения продольной оси показывает, что данный случай приближается к случаю нулевого поперечного уклона. Такое движение безопасно при условии, что левое управляющее колесо во время резких вильков не переходит на правую сторону дороги. 5. На кривых радиусом 300–2000 м характер колебаний аналогичен указанному в п. 2, но с более быстрым их затуханием и более быстрым приближением к кромке проезжей части. Это, видимо, результат влияния кривизны траектории движения. Наехать ли на кирпич? На дороге первоначальным импульсом возмущения иногда является подбрасывание одного из управляемых колес при наезде на препятствия (колодцы, упавшие предметы и др.). Чтобы уточнить влияние этого фактора, был проведен следующий простой эксперимент. Автомобиль, двигавшийся прямолинейно, наезжал на препятствие полукруглой формы высотой около 150 мм. В первый момент после наезда он продолжал двигаться прямолинейно, но затем, видимо, в результате появления дестабилизирующего момента из-за крена началось достаточно плавное отклонение продольной оси автомобиля от прямолинейного направления. Амплитуда при этом была также незначительной. В качестве закономерности было отмечено, что автомобиль после «прыжка» одного из колес стремится совершить колебание в сторону подскакивающего колеса. Можно предполагать, что картина изменится при увеличении высоты препятствия и автомобиль будет иметь тенденцию к «уходу» от препятствия, т. е. будет преобладать влияние составляющей веса автомобиля при наклоне, а не в момент «рыскания». Это свидетельствует о том, что зачастую безопаснее наехать на кирпич или небольшой предмет, чем делать резкий и опасный вилек. Объезд препятствия слева или справа? Ну а как быть, если камень на дороге покрупнее кирпича или рытвина довольно глубокая? Как лучше их объехать – справа или слева? Если бы система автомобиль – дорога была полностью симметричной, то было бы все равно. Но так как в нашей стране принято правостороннее движение, а дорожники, как правило, делают поперечный уклон для стока воды вправо, то левые объезды предпочтительнее. Вилек же вправо без наличия виража опаснее, так как к центробежной силе прибавляется сила веса, возникающая из-за поперечного уклона. Что такое безопасная дистанция? Около 50 % дорожно-транспортных происшествий происходят из-за того, что водители неправильно выбирают дистанцию при движении в потоке. Естественно, когда расстояние до движущегося впереди автомобиля незначительно, любое изменение обстановки может привести к тому, что водитель не успеет среагировать. С увеличением интенсивности движения просчеты водителя в выборе дистанции становятся все более опасными. Казалось бы, все тут просто: согласно Правилам дорожного движения безопасной следует считать такую дистанцию, которая позволила бы избежать столкновений, если транспортное средство впереди снизит скорость или остановится перед препятствием, перекрестком и т. д. Но при слишком большой дистанции вас будут постоянно обгонять и она каждый раз будет сокращаться, что создаст дополнительные трудности. Где же оптимальный вариант? При выборе безопасной дистанции следует помнить о том, как сильно влияют на тормозной путь скорость движения, состояние дорожного покрытия, тип и состояние протекторов шин, тип тормозов, масса автомобиля. Влияние массы покажем на примере. Так, при скорости 50 км/ч автомобиля массой 1800 кг (масса автомобиля «Волга») его тормозной путь составляет 15 м, автомобиля массой 2700 кг – 33 м. Выбор дистанции, как и скорости, безопасной в данной обстановке, является сложным поведенческим актом водителя и отражает его профессиональный опыт: прошлые решения и оценки обстановки, ошибки, пережитые опасные ситуации в сложных условиях движения. Безопасная дистанция в условиях города не является раз и навсегда заданной. Представим себе поток автомобилей, движущихся в крайнем левом ряду по перегону оживленной магистрали в часы пик. Дистанция между автомобилями несколько метров (в пределах десяти). Было бы грубой ошибкой сохранять такую же дистанцию при приближении к нерегулируемому перекрестку, пешеходному переходу: ее нужно заблаговременно увеличить. Главное, на что нужно обращать внимание молодых водителей, – это выбор дистанции в зависимости от вероятности резкого торможения лидера (впереди идущего автомобиля). Чем выше такая вероятность, тем раньше надо начинать увеличение дистанции. Это первый важный момент. Второй – это синхронность действий водителей лидирующего и следующего за ним автомобиля при выполнении торможения, например, у светофора. Рассмотрим такую ситуацию. Пусть водители однотипных автомобилей, одновременно заметив смену сигнала светофора на запрещающий движение, одновременно и с одинаковой интенсивностью начали торможение. Какова в этом случае безопасная дистанция, т. е. дистанция, позволяющая предотвратить попутное столкновение? Ответ очевиден: эта дистанция может быть ничтожно малой. Возьмем другой пример. Пусть водитель автомобиля, следующего за лидером, не заметил смены сигнала светофора и начал торможение лишь тогда, когда увидел горящие стоп-сигналы лидера. Какова в этом случае безопасная дистанция? При скорости, например, 60 км/ч она должна быть около 17 м. Почему же столь различны дистанции в этих случаях, хотя и та и другая позволяют избежать столкновения? Потому что действия обоих водителей в первом случае были одновременны и однотипны, во втором – имело место значительное запаздывание в действиях водителя автомобиля, следовавшего за лидером. Причина подавляющего большинства попутных столкновений (кроме случаев, когда водители проявляли явную невнимательность) заключается в недостаточном умении водителей «мыслить за лидера» и принимать согласованные с ним решения. Кроме того, причиной столкновения часто является либо пренебрежение различием тормозных характеристик транспортных средств, либо неумение их учесть. К примеру, перед перекрестком легковой автомобиль резко затормозил при появлении желтого сигнала – применил экстренное торможение. Но тяжелому автобусу не хватило того десятка метров, которые отделяли его от легкового автомобиля перед сменой сигналов светофора. Случаи резкого торможения лидера на перегоне – явление редкое, поэтому осуществить синхронность действий здесь предельно просто. В результате и безопасная дистанция на перегоне может быть минимальной. При приближении к пересечению, к любой зоне повышенной опасности (ЗПО) для выполнения синхронных действий необходим большой опыт. Если же он недостаточен, то дистанция должна быть увеличена. Уровень безопасности любой конкретной дистанции следует рассматривать только в отношении характера дорожно-транспортной ситуации (ДТС) и мастерства водителя. Между тем рекомендации на этот счет предельно просты: как уже упоминалось, дистанция численно равна примерно половине скорости при движении на сухом горизонтальном участке дороги с твердым покрытием. Однако механизм восприятия расстояния у человека работает с значительной погрешностью: водитель просто не в состоянии оценить, больше или меньше, например, чем 30 м (дистанция безопасности при скорости 60 км/ч), отделяют его от лидирующего автомобиля. Кроме того, в транспортных потоках высокой плотности такие дистанции, как показывает практика, нереальны. Поэтому для работы в условиях крупного города важны навыки «упреждения» процесса торможения лидера, навыки ситуационного прогнозирования обстановки при приближении к любой зоне повышенной опасности. К ЗПО всегда примыкает зона подхода. В зоне подхода необходимо увеличить дистанцию. Имеют важное практическое значение вопросы: где начинается и где кончается зона подхода, в чем суть опережающей реакции применительно к выбору дистанции, на каком удалении от ЗПО необходимо начать реализацию опережающего торможения и до какого значения следует увеличить расстояние до идущего впереди автомобиля. Под «раздражителем», под сигналом к торможению применительно к рассматриваемой ситуации понимается ожидание торможения лидера. Современные условия движения, а точнее скорости развития ситуации, требуют не оперативной реакции на торможение лидера (в этом случае дистанция действительно должна ориентировочно определяться согласно упомянутым выше рекомендациям), а опережающей реакции на ожидание его торможения. Дистанция вне зоны подхода необходима, во-первых, для наблюдения за причиной, которая может побудить лидера применить торможение, и, во-вторых, для сглаживания колебаний скорости автомобиля, следующего за лидером, из-за неравномерности хода последнего. На перегоне тип лидирующего автомобиля влияет лишь на условия обзора: чем больше габариты лидера, тем больше минимальная дистанция, позволяющая подготовиться к возможному его торможению. Рекомендации в этом случае: дистанция на перегоне должна обеспечить возможность при приближении к опасной зоне заблаговременно увеличить дистанцию до безопасного значения. При опережающем снижении скорости при входе в зону подхода и увеличении тем самым дистанции уже необходимо учитывать различия в тормозных характеристиках того или иного автомобиля. Выделение зоны подхода диктует необходимость двух определений безопасной дистанции – до зоны подхода и в конце ее, перед ЗПО: 1. Значение дистанции соответствует безопасной, если обеспечиваются удовлетворительные условия обнаружения любых побудительных причин, на которые лидер (и следующий за ним тоже) может и должен будет отреагировать торможением. 2. Значение дистанции соответствует безопасной, если при определенных условиях (различие тормозных характеристик автомобилей, состояние дороги и скорость автомобилей) и при психологической и физической готовности к торможению водитель автомобиля, следующего за лидером, имеет возможность остановиться, избежав столкновения с ним. Для определения начальной и конечной точек маневра (или, что то же самое, границ зоны подхода) были проведены расчеты с использованием известных соотношений для остановочных путей. Подразумевается выполнение планового замедления при выборе дистанции. Для случая, когда лидирующим является автомобиль «Волга», значения границ зоны подхода (читая от ближней границы ЗПО) приведены в табл. 2. Психологическая ориентация водителей на торможение – это ожидание, внутренняя нацеленность на обязательное торможение в следующий момент. Под готовностью к торможению имеется в виду заблаговременный перенос ноги с педали управления дросселем на тормозную педаль и выбор ее свободного хода. Водителю следует различать статическую (или наблюдаемую) и динамическую (или эффективную) дистанции. Первая дистанция явная, ее водитель видит постоянно, пока не тормозит, она связывается с равномерным движением. Вторая дистанция, связанная с процессом торможения, частично скрыта от него, и водитель сознает, какой она была, лишь когда уже остановился. Важно уметь чувствовать эту скрытую часть эффективной дистанции. Таблица 2 Расстояние до ЗПО в зависимости от скорости движения 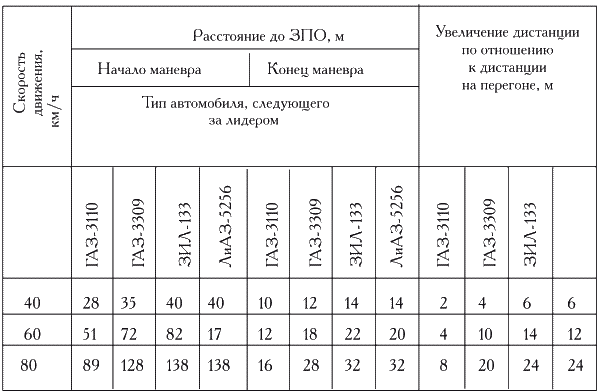 Примечание. При определении значений таблицы подразумевались применение лидером в ЗПО экстренного торможения и достаточность служебного торможения следующего за ним автомобиля для предотвращения попутного столкновения. Следует помнить, что различие в тормозных характеристиках транспортных средств проявляется тем сильнее, чем выше скорость. Отсюда вывод: чем выше скорость, тем при данном сочетании типов автомобилей больше скрытая часть эффективной дистанции, а значит, и сама эффективная дистанция. Неблагоприятным является сочетание в паре, когда автомобиль, следующий за лидером, является более инерционным, чем лидер. Неблагоприятность такого сочетания проявляется тем сильнее, чем хуже состояние проезжей части. Под инерционностью автомобиля понимается эффективность тормозной системы. Чем эффективность ниже, тем инерционней автомобиль. Выбор дистанции с запасом. Это одна из основ безаварийной работы. Этот запас можно обеспечить различными путями. Во-первых, выбором такой дистанции, при которой на экстренное торможение лидера достаточно ответить служебным торможением (запас по интенсивности торможения). Во-вторых, максимально возможным сокращением своего остановочного пути в результате заблаговременного переноса ноги на педаль тормоза и выбора свободного хода педали (запас по пути за время двигательных действий). Время переноса ноги составляет 0,25–0,30 с, время выбора свободного хода составляет несколько сотых секунды. Отсюда ориентировочно можно принять, что запас в метрах численно будет равен десятой части скорости. Следует помнить, что если вы не подготовитесь таким образом к торможению, а лидер эти действия выполнит, то запас в 1/10 скорости у вас может не оказаться. В-третьих, запас дистанции можно получить, психологически настроив себя на обязательное торможение в следующее мгновение. Такая готовность есть не что иное, как сокращение числа возможных действий по управлению автомобилем до одного, в крайнем случае до двух. В качестве выводов приведем рекомендации по выбору безопасной эффективной дистанции. Эффективная дистанция тем больше: 1. Чем больше вероятность торможения лидера. 2. Чем инерционнее автомобиль, следующий за лидером. 3. Чем больше нагружен движущийся за лидером автомобиль. 4. Чем хуже готовит себя водитель к торможению (как настроем на возможное торможение, так и переносом ноги на тормозную педаль и «выбором» ее свободного хода). 5. Чем больше изменилось в худшую сторону состояние дорожного покрытия за последние часы. (В первые часы после наступления гололеда, в начале дождя водитель должен увеличивать дистанцию с учетом времени своей адаптации к новым условиям движения). 6. Чем больше ограничен обзор дороги неподвижными препятствиями, попутными и встречными автомобилями в зоне повышенной опасности. 7. Чем дальше ваш автомобиль от головного автомобиля образовавшейся колонны. 8. Чем выше скорость и хуже состояние проезжей части. (Из статистики известно, что именно при сочетании этих факторов происходит большая часть попутных столкновений). Более 30 % всех ДТП происходит из-за того, что водители неправильно выбирают дистанцию при движении за машиной-лидером. Рассмотрим несколько опасных типичных ситуаций. Ситуация 1. Водитель легкового автомобиля приближался по 4-полосной дороге к перекрестку, где ему надо было развернуться. Подъехав к перекрестку, он увидел, что разворот на нем запрещен. Проехав немного дальше, водитель увидел разрыв в сплошной линии разметки. Включил указатель левого поворота и, резко притормозив, начал разворот. В этот момент на него наехал двигавшийся сзади легковой автомобиль (рис. 42). 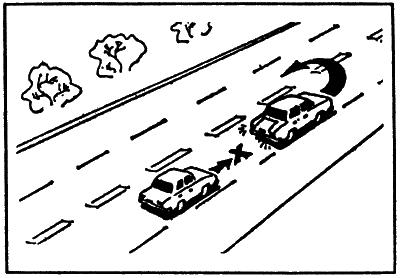 Рис. 42. Резкое торможение при маневре лидера из левого ряда Ситуация 2. Водитель легкового автомобиля «Жигули» двигался в левом ряду 4-полосной дороги с двумя пассажирами. Правая полоса была занята. Подъезжая к перекрестку, водитель увидел слева магазин, к которому очень торопились пассажиры. Резко затормозив, не включив указатель левого поворота, он начал совершать поворот и почувствовал сильный удар: микроавтобус, догнав «Жигули», ударил его сзади, развернул и выбросил на полосу встречного движения (рис. 43). 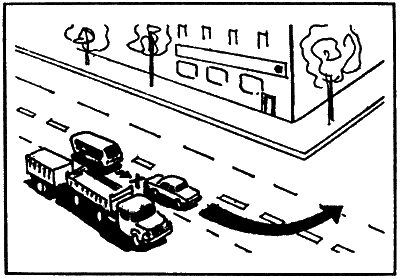 Рис. 43. Инцидент из-за отсутствия сигнала указателя маневра Ситуация 3. Вечером по двухполосной дороге с движением в двух направлениях на высокой скорости ехал автомобиль «Жигули». За ним на малой дистанции следовали друг за другом грузовик и микроавтобус. Впереди показался поворот налево с ограниченной деревьями видимостью. С левой стороны дороги находились дома, а справа пустырь, окруженный деревьями. Не снижая скорости, «Жигули» начали проходить поворот, в то время как с пустыря дорогу стала переходить женщина с собакой. «Жигули» резко затормозили. На них наехал двигавшийся грузовой автомобиль и пытавшийся их обогнать микроавтобус. Причина ДТП – значительное превышение скорости в местах с ограниченной видимостью и движение с малой дистанцией (рис. 44). 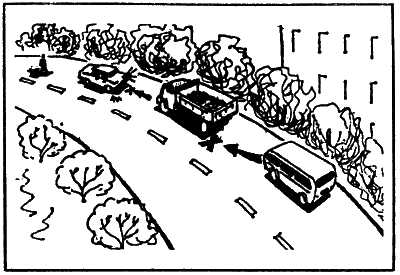 Рис. 44. ДТП в условиях ограниченной видимости различных помех Ситуация 4. Водитель «Жигулей» следовал на малой дистанции за пикапом во второй полосе 6-полосной дороги. Дело было днем при невысокой интенсивности движения. Впереди пикапа ехала «Волга». В это время на дорогу выбежал пешеход. Водитель «Волги» резко нажал на педаль тормоза и остановился. Пикап резко перестроился на левую полосу движения. Водитель «Жигулей» не заметил, как резко затормозила «Волга», и через несколько секунд, не успев предпринять никаких действий для избежания ДТП, врезался в «Волгу». Этого происшествия не произошло, если бы водитель «Жигулей» был внимателен и выбрал безопасную дистанцию для данных условий движения (рис. 45). 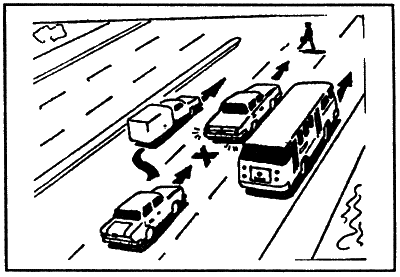 Рис. 45. Недостаточная дистанция в условиях неопределенности ситуации Советы: 1. В местах с ограниченной видимостью и обзорностью при движении за лидером выбирайте дистанцию с таким расчетом, чтобы можно было остановиться в случае аварийного торможения впереди идущего автомобиля. 2. Дистанция на сухом твердом покрытии между движущимися с одинаковой скоростью транспортными средствами (скорость движения не более 60 км/ч) должна быть численно (в метрах) не менее половины показания скорости по спидометру. 3. Если автомобиль загружен, то безопасная дистанция должна быть на 10–15 м больше по сравнению с негруженым. 4. Чем выше замедление при торможении автомобиля-лидера по сравнению с ведомым автомобилем, тем больше должна быть дистанция. 5. Тормозя перед поворотом (особенно левым), убедитесь, что двигающийся позади вас автомобиль находится на безопасной дистанции. 6. Перед совершением маневра заблаговременно (не менее чем за 5 с) включайте указатель поворотов. |
|
||